5月16日上午,在WGDC2024第十三届全球地理信息开发者大会上,泰伯智库正式发布了最新研究成果《自动驾驶与众源地图技术路线(政策)研究报告》。
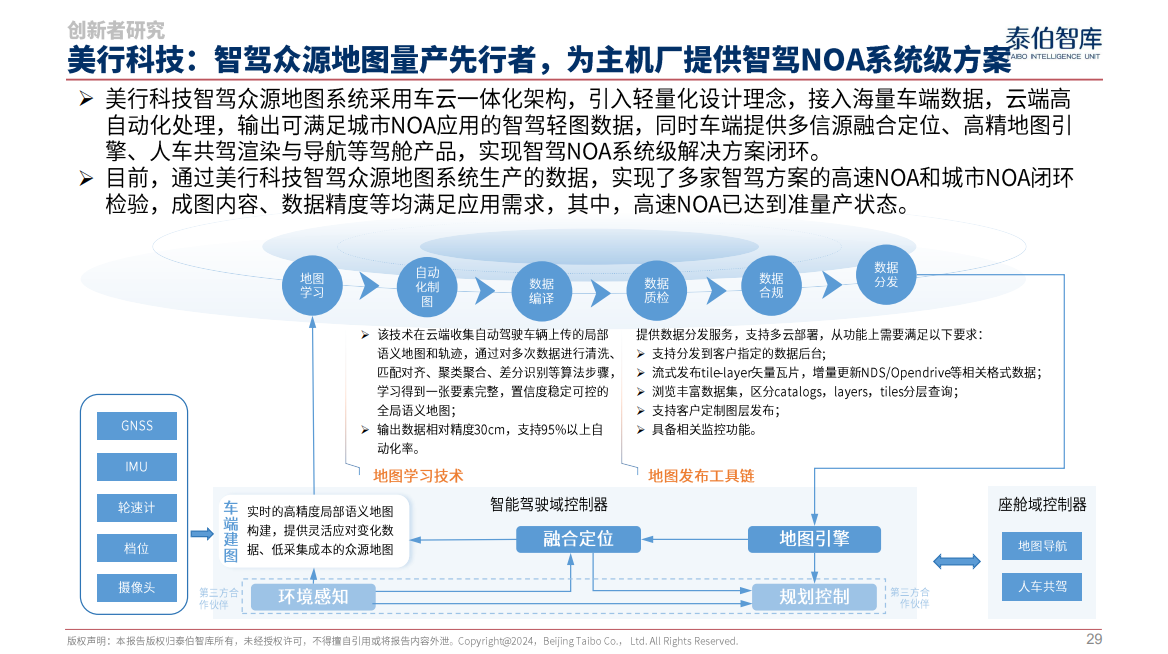
近年来,业内一直在寻求“轻地图”或“去高精地图”的高性价比技术方案。在此背景下,在合规的环境下构建基于自动驾驶感知结果的众源地图,实现了“重感知、轻地图”的理念,或将成为解决当前高阶智能方案感知困境的一个有效突破口。
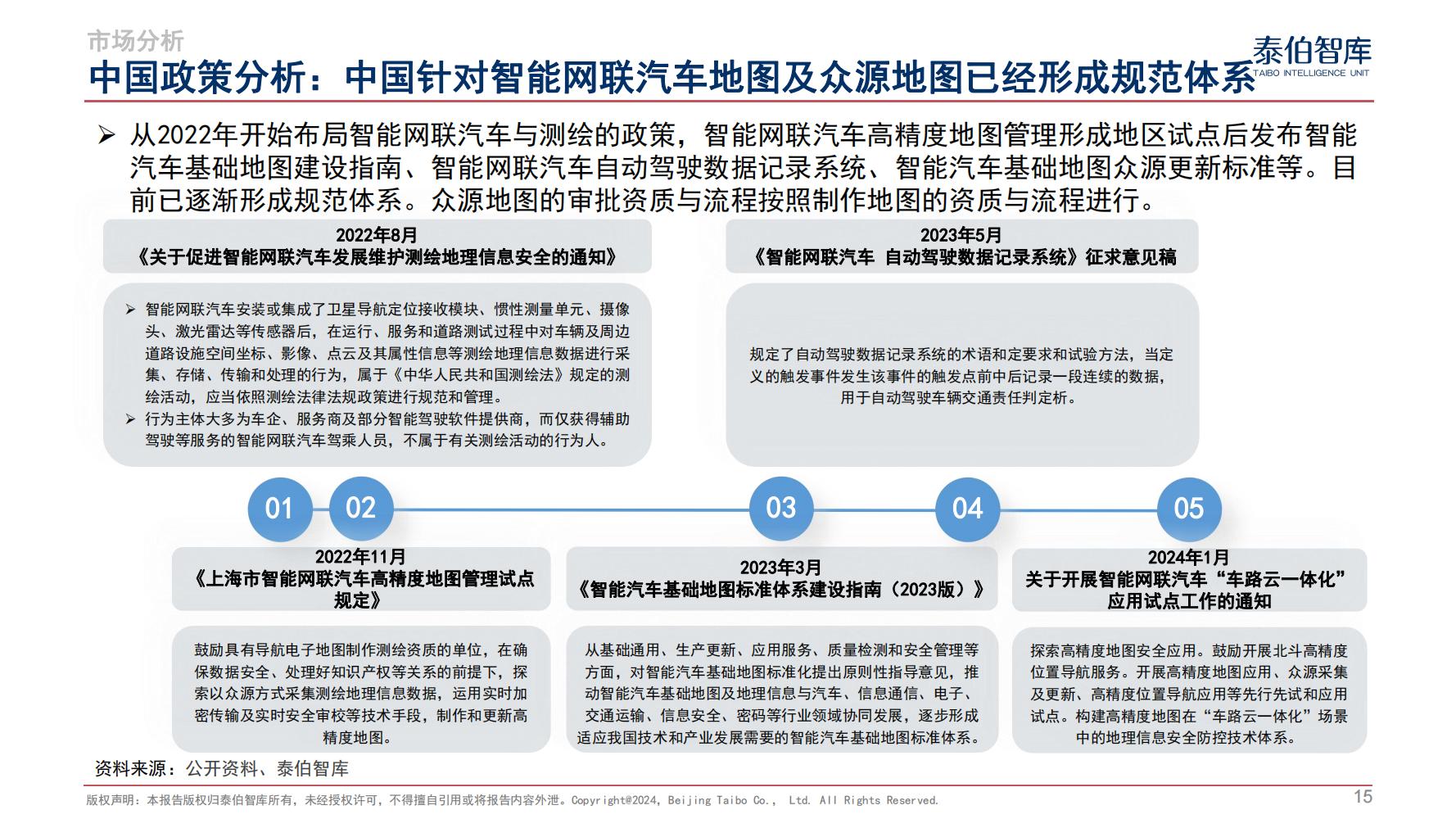
今年年初,工业和信息化部、自然资源部等五部委发布《关于开展智能网联汽车“车路云一体化”应用试点工作的通知》。其中明确提到,探索高精度地图安全应用;鼓励开展北斗高精度位置导航服务;开展高精度地图应用、众源采集及更新、高精度位置导航应用等先行先试和应用试点;构建高精度地图在“车路云一体化”场景中的地理信息安全防控技术体系。 中国针对智能网联汽车地图及众源地图已经形成相对规范的体系。
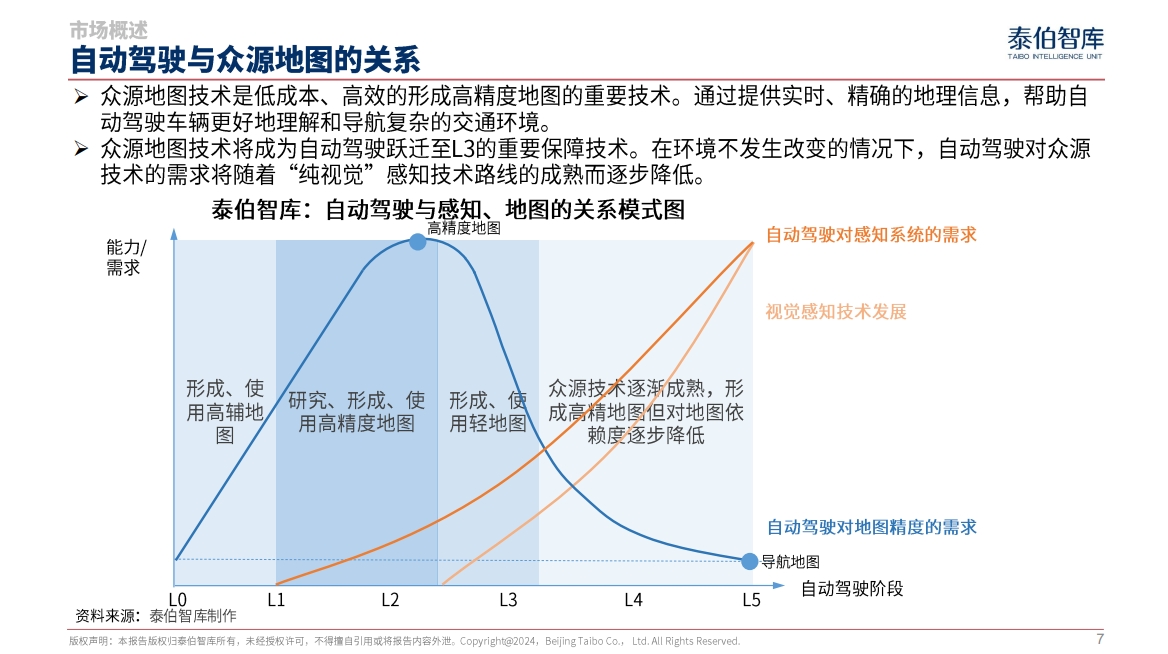
泰伯智库认为,目前自动驾驶处于L2+级或L2++级,未达到L3级。L2跃迁至L3还需在稳定性、安全性方面采集大量数据并进行长时间应用落地验证,地图则是重要的安全冗余。
泰伯智库预测,未来5年,众源地图相关政策、指南、团体标准将逐步健全,更注重众源地图的安全性;“雷达+视觉”仍是精度高、最安全的解;基于众源地图城市NOA的逐步量产将助力智驾跃迁至L3级。
本次报告重点研究了自动驾驶与众源地图产业的市场现状,详细阐述了当前自动驾驶与众源地图产业的产业生态、竞争力格局和市场机会,并对产业的创新者展开了研究,最后对未来5-10年的应用前景和技术挑战、政策和监管趋势等进行了解读和预测。
简版报告请见图片,获取完整报告,请点击下方在线阅读报告。


 扫码支付
扫码支付